Teleoperation infrastructure
for any robot.
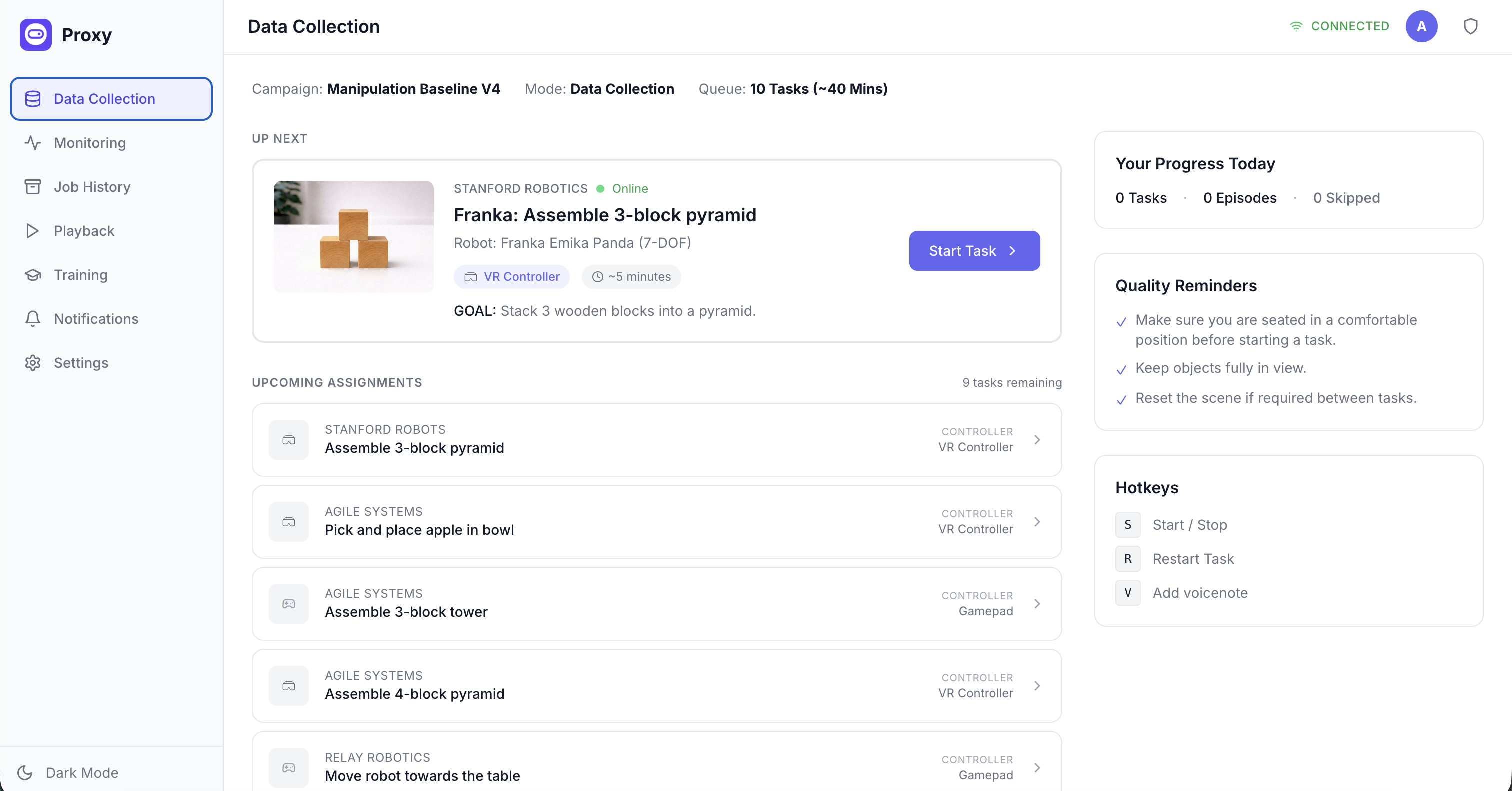
Cross-embodiment teleop that works on any robot, anywhere in the world. Collect training data, intervene on deployed robots in real time, or both.
Cross-embodiment teleop that works on any robot, anywhere in the world. Collect training data, intervene on deployed robots in real time, or both.
Share your URDF and control API - Proxy configures the rest. AMRs, humanoids, bi-arms or earthmovers, on Gamepad, Quest VR, haptic glove, or the browser.
Proprietary stack eliminates perceived latency. Operators see <50ms feedback vs ~300ms industry standard - even across continents.
AMRs, humanoids, bi-arms or earthmovers. Share your URDF and control API - Proxy configures the rest. Works with Gamepad, Quest VR, haptic glove, or browser-based control.
Teleop from anywhere globally. Benchmarked between Bengaluru and Stanford with full task completion.
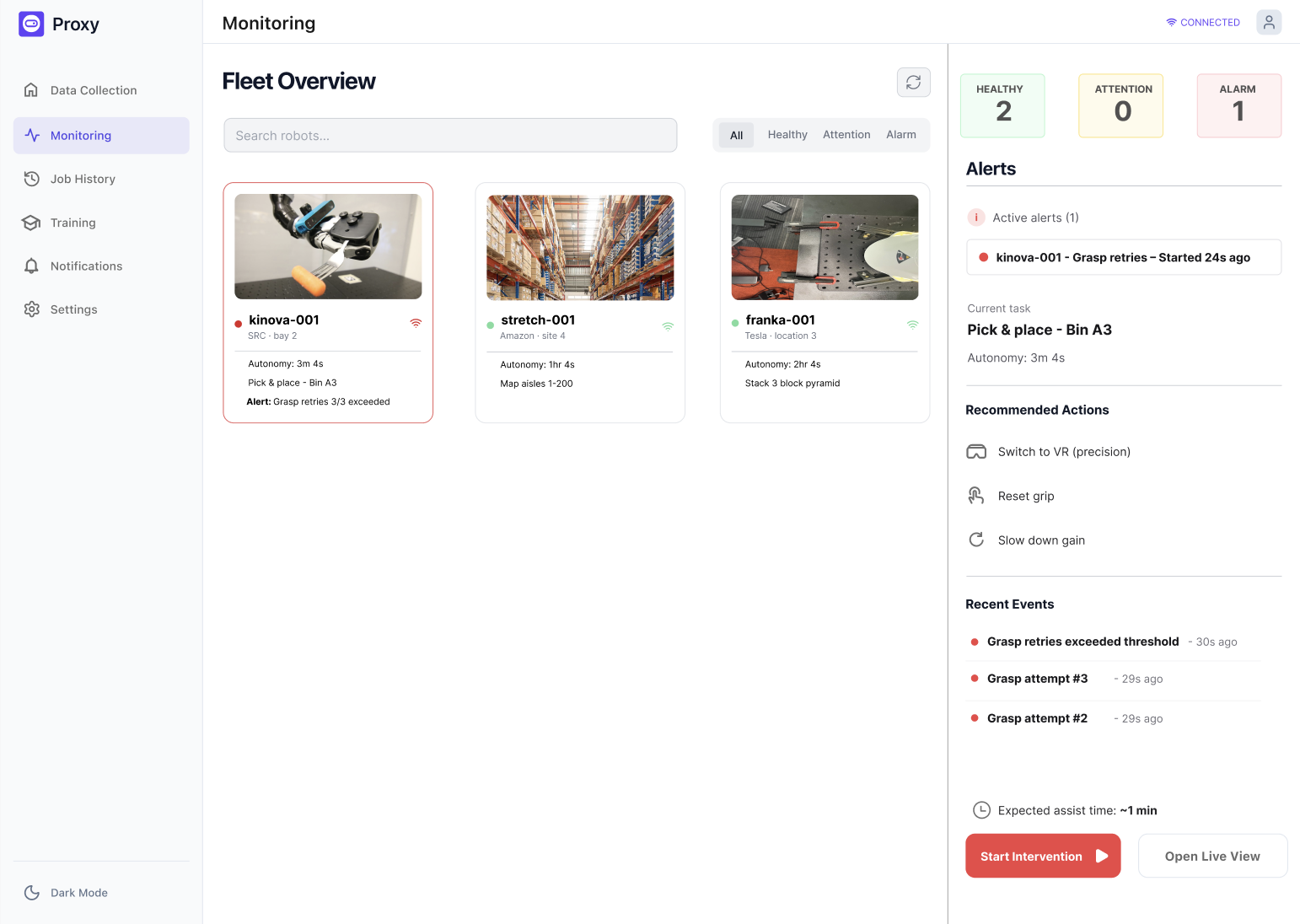
When your robot hits an edge case in production, Proxy operators intervene in real time. 100% task completion rate for your customers.
Dedicated FDEs embed with your team from Day 1 to integrate Proxy, configure your embodiment, and ensure a smooth launch.
Bring your own operators and use Proxy as infrastructure, or let us handle end-to-end operations with our trained teleoperator network.
We'll show you cross-continental teleoperation in real time. See how Proxy integrates with your robot and starts delivering training-ready data in days.
Our team will reach out within 24 hours to schedule your demo.